White paper
Surveillance in the Cloud¶

Trade surveillance systems analyze up to terabytes of order and trade data daily, in an effort to detect potential market abuses. The logic to identify these transgressors is complex, and computationally expensive over such large data sets. For financial institutions that fail to report illegal activity within their ranks in a timely manner, regulatory fines loom.
That’s why many exchanges, brokers and investment banks opt for KX Surveillance, built on the world’s fastest timeseries database, kdb+. With kdb+, complex analysis of trading behavior across realtime and historical data can be done at record speeds, ensuring regulatory deadlines are always met.
But speed is not the only important factor of a surveillance system. There’s also a need for fault tolerance and scalability. Cloud infrastructure has revolutionized the way we can approach building applications. We can now auto-scale resources as data volumes increase, dynamically provision new disk storage as needed, and quickly spawn replications of an application in the event of a fault. These are desirable features for a surveillance system, that can provide increased performance and reliability. However, committing to a single cloud provider can be daunting, as it can be difficult to untangle an application from the cloud provider once it’s been built there.
Thus, we also want a surveillance system that is portable, not dependent on any one cloud provider. This can be achieved using Kubernetes. Kubernetes is an open-source container orchestration platform, that allows us to automate a lot of the manual steps involved in deploying, managing, and scaling containerized applications. Applications built using Kubernetes can be deployed across all the main cloud providers (AWS, GCP and Azure) and immediately take advantage of their scalable resources. Kubernetes is the gateway to the Cloud, providing all its advantages, without having to commit fully to any single Cloud provider.
In this paper we will build a mini surveillance kdb+ application and deploy it locally, on AWS and on GCP using Kubernetes. This will demonstrate how Kubernetes helps to unlock the power of the cloud, while retaining fine-tuned control over the application’s components and where they ultimately reside. It will also emphasize the benefits of building applications on top of a Kubernetes-centric data platform, such as KX Insights.
The application¶
The first step is to construct a mini surveillance application. The application will run one alert called Spoofing. Spoofing is a form of market manipulation where a market participant or group of market participants try to move the price of a financial instrument by placing non bona-fide orders on one side of the book, feigning an interest in the instrument, and causing the price to shift. Once the price has shifted, the orders are cancelled and new orders are placed on the other side of the book, taking advantage of the price change.
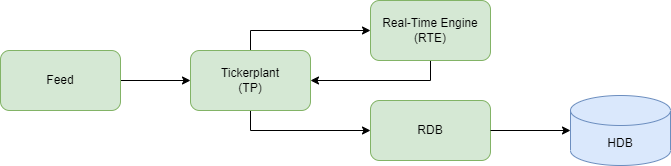
The application will detect in real time participants who are attempting to spoof the market, and publish them to a data store. It will have a simple realtime tickerplant architecture consisting of five processes, as can be seen in the graphic above. Let’s discuss each process in detail:
Feed¶
The first process in the architecture is a mock feed-handler. It loads in order data from a CSV and publishes it downstream to the TP in buckets, mimicking a realtime feed. The q code for this feed process can be seen below:
//MOCK FEED
// load required funcs and variables
system"l tick/sym.q"
system"l repo/cron.q"
\d .fd
h:hopen `$":",.z.x 0
pubData:([]table:`$();data:();rows:"j"$())
// add new data to the queue to be pubbed down stream
// specify how many rows you want published per bucket
addDataToQueue:{[n;tab;data]
`.fd.pubData upsert (tab;data;n) }
// func to pub data
pub:{[tab;data] neg[h] (`upd;tab;data)}
// Grab next buckets from tables in the queue and pub downsteam
pubNextBuckets:{[]
if[count pubData;
newPubData:{
pub[x[`table];x[`rows] sublist x[`data]];
x[`data]:x[`rows]_x[`data];
x} each pubData;
pubData::newPubData where not 0=count each newPubData[;`data]
]; }
\d .
// load in the test data
spoofingData:("*"^exec t from meta[`order];enlist csv)0:`$":data/spoofingData.csv"
// add as cron job
// pub every 1 second
.cron.add[`.fd.pubNextBuckets;(::);.z.P;0Wp;1000*1]
.z.ts:{.cron.run[]}
system "t 1000";pubData. Each item in the list will have the number of rows to publish per bucket, the table name and the data itself. Every second, the function .fd.pubNextBuckets will run to check if there are any items in the list, and if there is, it will publish the next bucket for each item. New data can be added to the pubData list by calling .fd.addDataToQueue, e.g. .fd.addDataToQueue[2;`order;spoofingData] will publish two rows of the spoofing test data downstream every second.
Tickerplant (TP)¶
The tickerplant ingests order data from the upstream mock feed process, writes it to a log file that can be used for disaster recovery (-11!), and publishes it downstream to the RDB and RTE. The RTE then analyzes the order data, and publishes alert data back to the tickerplant if it finds any suspicious behavior. The tickerplant will then publish this alert data to the RDB.
We won’t be going over the code for the tickerplant as it remains largely unchanged from the publicly available kdb-tick.
Realtime Engine (RTE)¶
The RTE is the core of the application, responsible for detecting bad actors attempting to spoof the market. It receives a realtime stream of order data from the TP, which it will run alert logic over. Any suspicious activity detected will trigger an alert to be sent back to the TP, which will be published to the RDB.
Let’s have a look at the spoofing alert code.
Simplified example
This is a simplified version of a spoofing alert that only analyzes order data, monitoring the cancelled orders of each entity. A more complex version would also ingest trade data to look for a trade executed on the opposite side of the cancelled orders, and may also ingest market quotes to determine how far orders placed are from the best bid and ask.
alert:{[args]
tab:args`tab;
data:args`data;
thresholds:args`thresholds;
// cache data
// entity = sym+trader+side
data:update entity:`$sv["_"] each
flip (string[sym];trader;string[side]),val:1 from data;
`.spoofing.orderCache upsert data;
delete from `.spoofing.orderCache
where time<min[data`time]-thresholds`lookbackInterval;
// interested in cancelled orders
data:select from data where eventType=`cancelled;
// window join
windowTimes:enlist[data[`time] - thresholds`lookbackInterval],enlist data[`time];
cancelOrderCache:`entity`time xasc
update totalCancelQty:quantity,totalCancelCount:val from
select from .spoofing.orderCache where eventType=`cancelled;
data:wj[windowTimes; `entity`time; data;
(cancelOrderCache;(sum;`totalCancelQty);(sum;`totalCancelCount))];
// check1: check to see if any individual trader has at any point
// had their total cancel quantity exceed
// the cancel quantity thresholds on an individual instrument
// check2: check to see if any individual trader has at any point
// had their total cancel count exceed
// the cancel count thresholds on an individual instrument
alerts:select from data where
thresholds[`cancelQtyThreshold]<totalCancelQty,
thresholds[`cancelCountThreshold]<totalCancelCount;
// Prepare alert data to be published to tp
alerts:update
alertName:`spoofing,
cancelQtyThreshold:thresholds[`cancelQtyThreshold],
cancelCountThreshold:thresholds[`cancelCountThreshold],
lookbackInterval:thresholds[`lookbackInterval]
from alerts;
cols[orderAlerts]#alerts }lookbackInterval , a configurable time window. This lookback is set in the spoofingThresholds.csv file:
cancelQtyThreshold,cancelCountThreshold,lookbackInterval
4000,3,0D00:00:25.0000000As seen above, the lookbackInterval is set to 25 seconds. Therefore, only data that is less than 25 seconds old will be retained for analysis on each bucket, as can be seen from this line:
delete from `.spoofing.orderCache
where time<min[data`time]-thresholds`lookbackInterval;There are also two other configurable parameters in the spoofingThresholds.csv: cancelQtyThreshold and cancelCountThreshold. The cancelQtyThreshold defines the minimum total order quantity for cancelled orders that an entity must exceed within the lookbackInterval in order to trigger an alert. The cancelCountThreshold defines the minimum number of cancelled orders that an entity must exceed within the loobackInterval in order to trigger an alert. If both thresholds are exceeded, an alert is triggered. Here an entity is defined as sym+trader+side, i.e. we are interested in trader activity on a particular side (buy or sell) for a particular instrument.
As an example, see the test data set below:
time sym eventType trader side orderID price quantity
---------------------------------------------------------------------------------------------
2015.04.17D12:00:00.000000000 SNDL new "SpoofingTrader" S "SPG-Oid10" 1.25 1000
2015.04.17D12:00:01.000000000 SNDL new "SpoofingTrader" S "SPG-Oid11" 1.25 1100
2015.04.17D12:00:04.000000000 SNDL new "SpoofingTrader" S "SPG-Oid12" 1.25 1200
2015.04.17D12:00:05.000000000 SNDL cancelled "SpoofingTrader" S "SPG-Oid10" 1.25 1000
2015.04.17D12:00:05.000000000 SNDL new "SpoofingTrader" S "SPG-Oid13" 1.23 1300
2015.04.17D12:00:06.000000000 SNDL new "SpoofingTrader" B "SPG-Oid14" 1.25 2000
2015.04.17D12:00:10.000000000 SNDL cancelled "SpoofingTrader" S "SPG-Oid12" 1.25 1200
2015.04.17D12:00:11.000000000 SNDL cancelled "SpoofingTrader" S "SPG-Oid11" 1.25 1100
2015.04.17D12:00:12.000000000 SNDL filled "SpoofingTrader" B "SPG-Oid14" 1.25 2000
2015.04.17D12:00:20.000000000 SNDL cancelled "SpoofingTrader" S "SPG-Oid13" 1.23 1300There are four cancelled sell orders on the sym SNDL within 25 seconds by SpoofingTrader, with a total quantity of 4,600. Therefore, both thresholds are exceeded, so an alert will be triggered, as can be seen below:
time sym eventType trader side orderID price quantity alertName totalCancelQty totalCancelCount cancelQtyThreshold cancelCountThreshold lookbackInterval
----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
2015.04.17D12:00:20.000000000 SNDL cancelled "SpoofingTrader" S "SPG-Oid13" 1.23 1300 spoofing 4600 4 4000 3 0D00:00:25.000000000Latency and efficiency considerations for a realtime surveillance system
Data store¶
The Realtime Database and Historical Database make up the data store. The RDB receives order and alert data from the upstream TP and stores it in memory. At the end of the day, the RDB writes this data to disk and clears out its in-memory tables. The data written to disk can be queried by the HDB. In the event the RDB goes down intra-day, it will recover the lost data from the TP’s log file once it’s restarted.
Containerization¶
So far we have discussed the inner workings of the processes that make up the surveillance application. Now we need to containerize it and push it to an image repository so that it can be retrieved in a Kubernetes setup. There are many ways to create containerized images; in this document we show you how to do this via QPacker:
Configuring QPacker¶
The focal point of an application packaged with QPacker is the qp.json file. It contains the metadata about the components that comprise the application. It should be placed in the root directory of the application folder.
Here’s the qp.json file:
{
"tp": {
"entry": [ "tick.q" ]
},
"feed": {
"entry": [ "tick/feed.q" ]
},
"rdb": {
"entry": [ "tick/r.q" ]
},
"rte": {
"entry": [ "tick/rte.q" ]
},
"hdb": {
"entry": [ "tick/hdb.q" ]
}
}To kick off the build process we call qp build in the root directory of the application folder. Under the covers QPacker uses Docker, so once the build process is finished, we can view the new images by running docker image ls. Initially the images won’t have names, but this can be remedied using docker tag. Here’s a Bash script that automates this procedure:
#!/bin/bash
qp build;
if [ ! -d "qpbuild" ]
then
echo "Error: qbuild directory does not exist";
exit;
fi
cp qpbuild/.env .;
source .env;
docker tag $tp luke275/surv-cloud:tp;
docker tag $rte luke275/surv-cloud:rte;
docker tag $rdb luke275/surv-cloud:rdb;
docker tag $feed luke275/surv-cloud:feed;
docker tag $hdb luke275/surv-cloud:hdb;In order to push images to Docker Hub, the image name must match the name of the repository. Thus, we tag the images with the name luke275/surv-cloud, since this is the name of the image repository we are using on Docker Hub. We push the images to the repository using docker push:
docker push luke275/surv-cloud:tp;
docker push luke275/surv-cloud:rte;
docker push luke275/surv-cloud:rdb;
docker push luke275/surv-cloud:feed;
docker push luke275/surv-cloud:hdb;Integrating with Kubernetes¶
Now that the application is containerized and pushed to an image repository, it can be integrated into a Kubernetes cluster.
Configuration¶
The smallest deployable unit in a Kubernetes application is a pod. A pod encapsulates a set of one or more containers that have shared storage/network resources and specification for how to run the containers. A good way of thinking of a pod is as a container for running containers.
A common way for deploying a pod into a Kubernetes cluster is to define them within a deployment. Deployments act as a management tool that can be used to control the way pods behave. The composer of a deployment configuration file outlines the desired characteristics of a pod such as how many replicas of the pod to run. Deployments are very useful in a production environment, as they allow for applications to scale to meet demand, automatically restart pods if they go down and provide a mechanism for seamless upgrades with zero downtime.
Each of the five components of the surveillance application will have its own deployment specification and will be deployed within separate pods. This provides a greater degree of control over each component, as it allows us to scale each one individually without also having to scale the others.
The specification below describes the deployment for the RDB process:
apiVersion: apps/v1
kind: Deployment
metadata:
name: rdb
namespace: surv-cloud
spec:
selector:
matchLabels:
app: rdb
version: 1.0.0
replicas: 1 # tells deployment to run 1 pods matching the template
template: # create pods using pod definition in this template
metadata:
labels:
app: rdb
version: 1.0.0
spec:
securityContext:
fsGroup: 2000
containers:
- name: rdb
image: luke275/surv-cloud:rdb
env:
- name: KDB_LICENSE_B64
value: "" # insert base64 license string here
args: ["tp:5011 hdb:5015 /opt/surv-cloud/app/hdb -p 5012"]
ports:
- containerPort: 5012
volumeMounts:
- mountPath: /opt/surv-cloud/app/tplogs
name: tplogs
- mountPath: /opt/surv-cloud/app/hdb
name: hdbdir
volumes:
- name: tplogs
persistentVolumeClaim:
claimName: tp-data
- name: hdbdir
persistentVolumeClaim:
claimName: hdb-dataWithin the deployment we specify that a single RDB container will run within the pod and there will be only one replica of the pod running. The container will be created using the image luke275/surv-cloud:rdb that we pushed to the public Docker repository earlier, and will be accessible on port 5012 within the pod.
The container mounts two volumes. Volumes provide a mechanism for data to be persisted. How long the data is persisted, depends on the type of volume used. In this case, the container is mounting a persistent volume, which is distinct from other types of volumes: it has a lifecycle independent of any individual pod. This means if all pods are deleted, the volume will still exist, which is not true for regular volumes. The volumes themselves aren’t directly created within the deployment, they simply reference existing persistent volume claims, which are requests for the cluster to create new persistent volumes. They have their own specification:
kind: PersistentVolumeClaim
apiVersion: v1
metadata:
name: tp-data
namespace: surv-cloud
spec:
accessModes: ["ReadWriteOnce"]
resources:
requests:
storage: 1Gi
---
kind: PersistentVolumeClaim
apiVersion: v1
metadata:
name: hdb-data
namespace: surv-cloud
spec:
accessModes: ["ReadWriteOnce"]
resources:
requests:
storage: 1GiTo expose the RDB to other pods in the cluster, a service has to be created. Services provide a consistent endpoint that other pods can communicate with. Below is the service specification for the RDB:
apiVersion: v1
kind: Service
metadata:
name: rdb
namespace: surv-cloud
spec:
type: ClusterIP
clusterIP: None
ports:
- port: 5012
protocol: TCP
targetPort: 5012
name: tcp-rdb
selector:
app: rdbClusterIP, the RDB will only be exposed internally within the cluster. Other service types such as LoadBalancer expose the service outside the cluster, as we’ll see when discussing the user interface.
This summarizes the configuration required to deploy the RDB process to Kubernetes. We won’t be going over the configuration required for the other components of the application, since it’s very similar to the RDB.
User interface¶
To quickly create some visualizations on top of this surveillance application built in Kubernetes, we can use KX Dashboards.
There are three images that make up the KX Dashboards architecture, gui-dash, gui-gateway and gui-data. We deploy them into a Kubernetes cluster by creating separate deployments for the three images, along with an accompanying service per deployment. The configuration is similar to the RDB discussed earlier, with a couple of notable differences. The first, is that the service for gui-dash will be exposed externally as a LoadBalancer, so that the dashboards can be accessed from a browser. See it’s configuration below:
apiVersion: v1
kind: Service
metadata:
name: gui-dash
namespace: surv-cloud
spec:
type: LoadBalancer
ports:
- port: 9090
protocol: TCP
targetPort: 8080
selector:
app: gui-dashHere the pod is being exposed on port 9090. We’ll see later how we use this port to access the UI across the AWS and GCP clusters.
The second notable difference is that within the gui-gateway deployment an initContainer is defined so that we can import the Spoofing dashboard. See below:
initContainers:
- name: gw-data-download
image: alpine:3.7
command: ["/bin/sh","-c"]
args: ['apk add --no-cache git && git clone https://github.com/lukebrit27/surv-cloud.git && mkdir -p /opt/kx/app/data && cp -r surv-cloud/dash/gw-data/* /opt/kx/app/data/']
volumeMounts:
- mountPath: /opt/kx/app/data
name: gw-data
containers:
- name: gui-gateway
image: registry.dl.kx.com/kxi-gui-gateway:0.10.1
env:
- name: KDB_LICENSE_B64
value: "" # insert base64 license string here
ports:
- containerPort: 10001
volumeMounts:
- mountPath: /opt/kx/app/data
name: gw-dataAn initContainer allows us to initialize a pod before it starts up any containers. In this case, the initContainer is cloning a Git repository that contains the Spoofing dashboard files and moving those files to a directory mounted by a volume. When the gui-gateway container starts up, it will pick up these files, as it mounts the same volume.
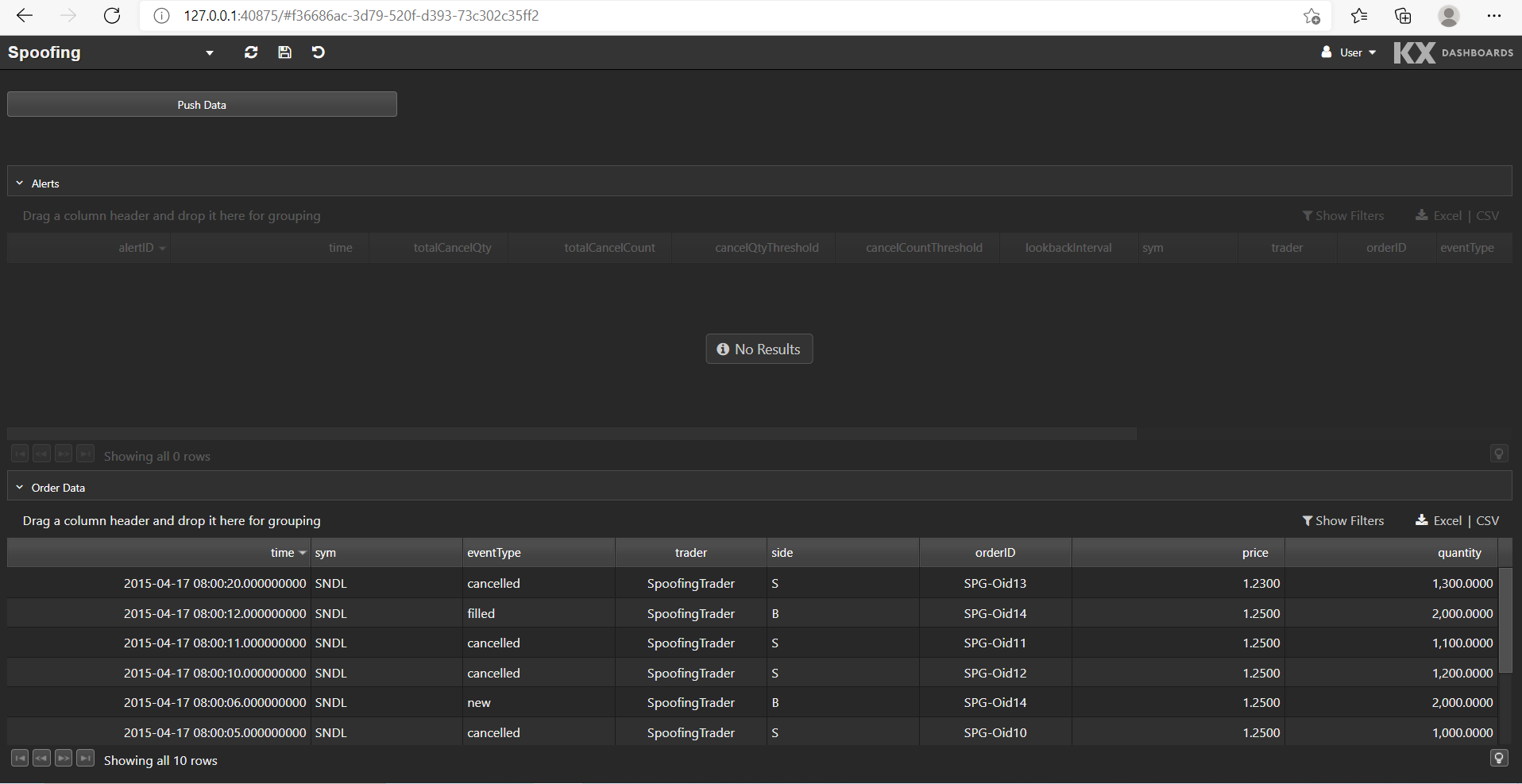
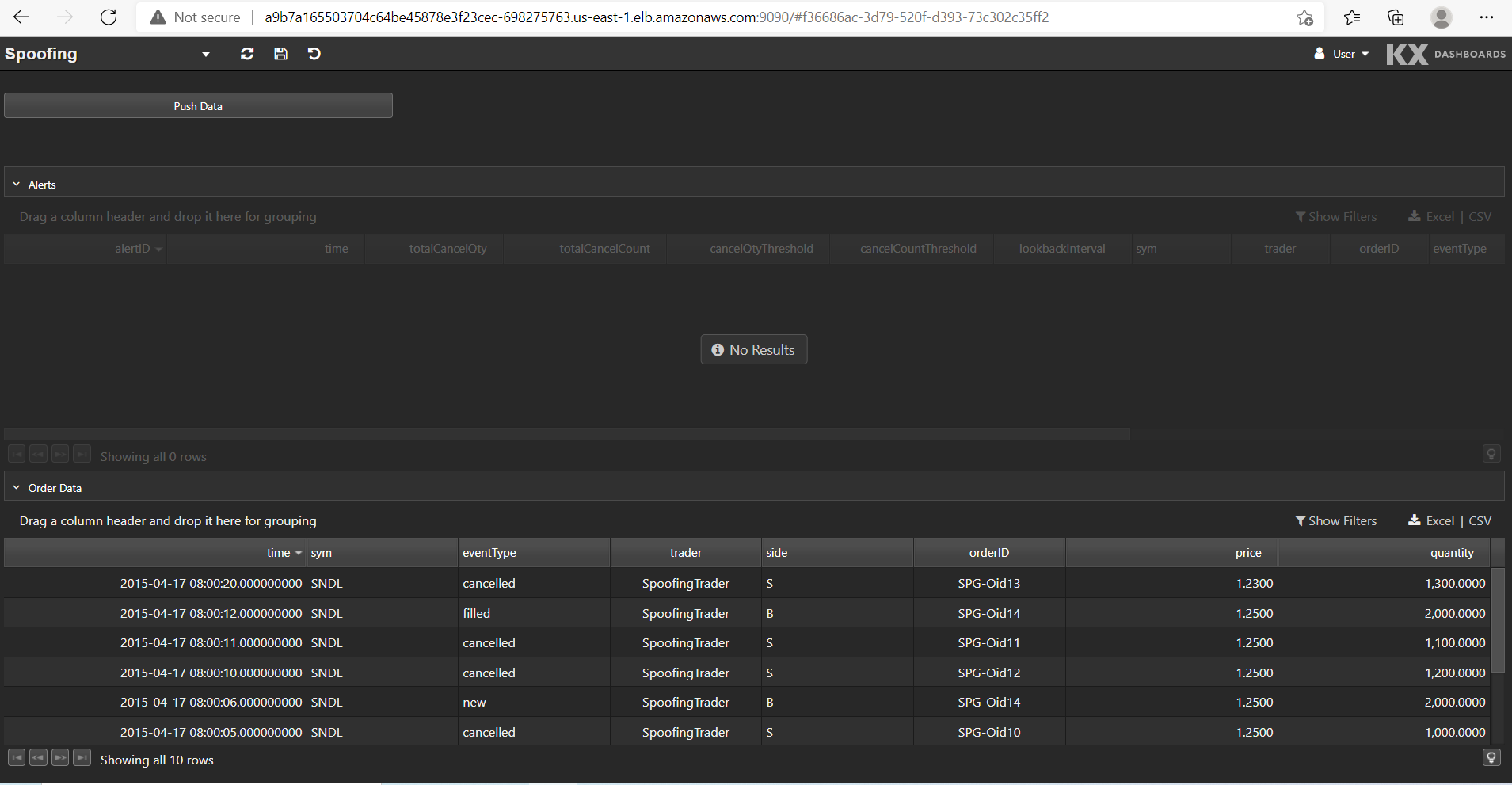
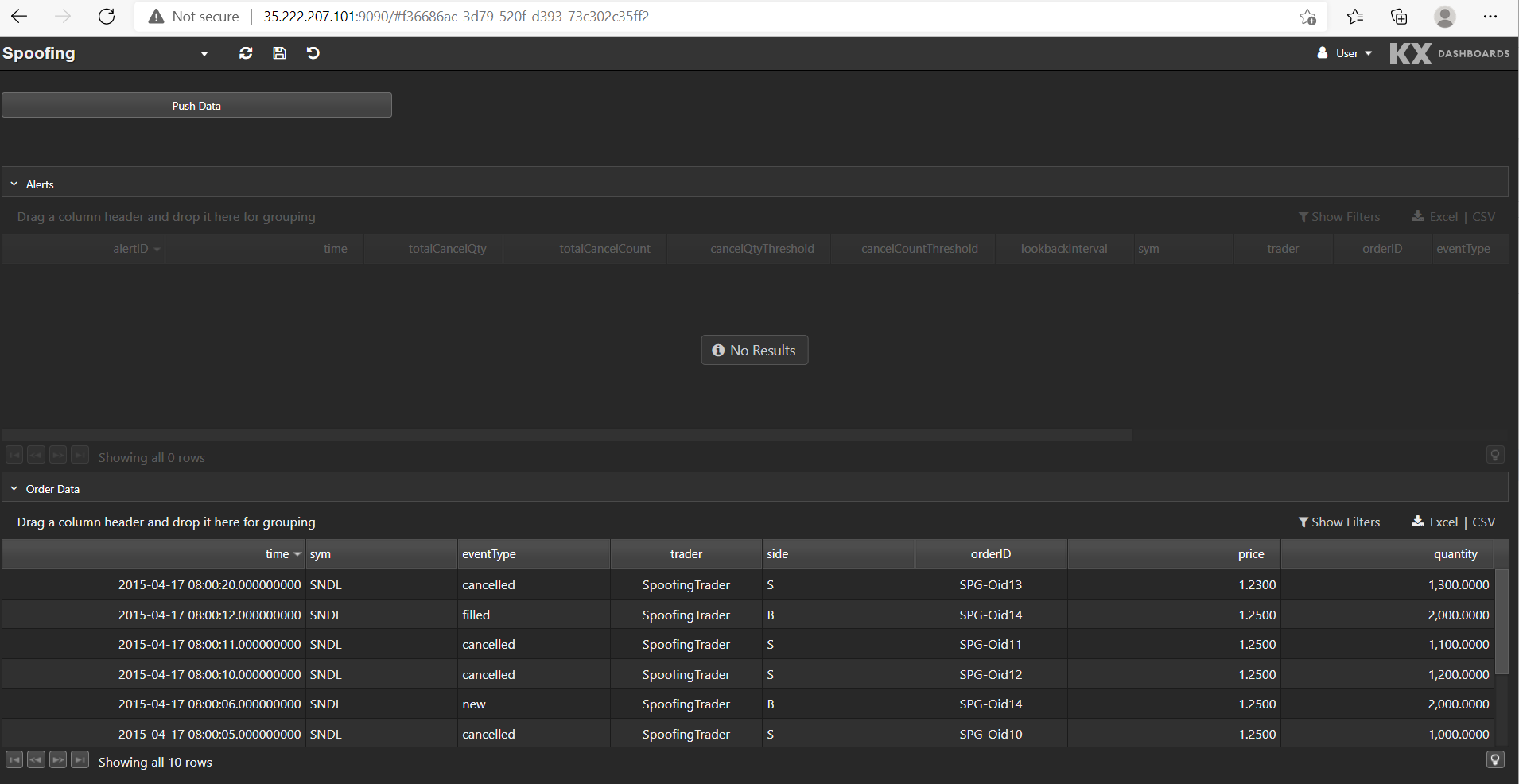
This is what the Spoofing dashboard looks like:
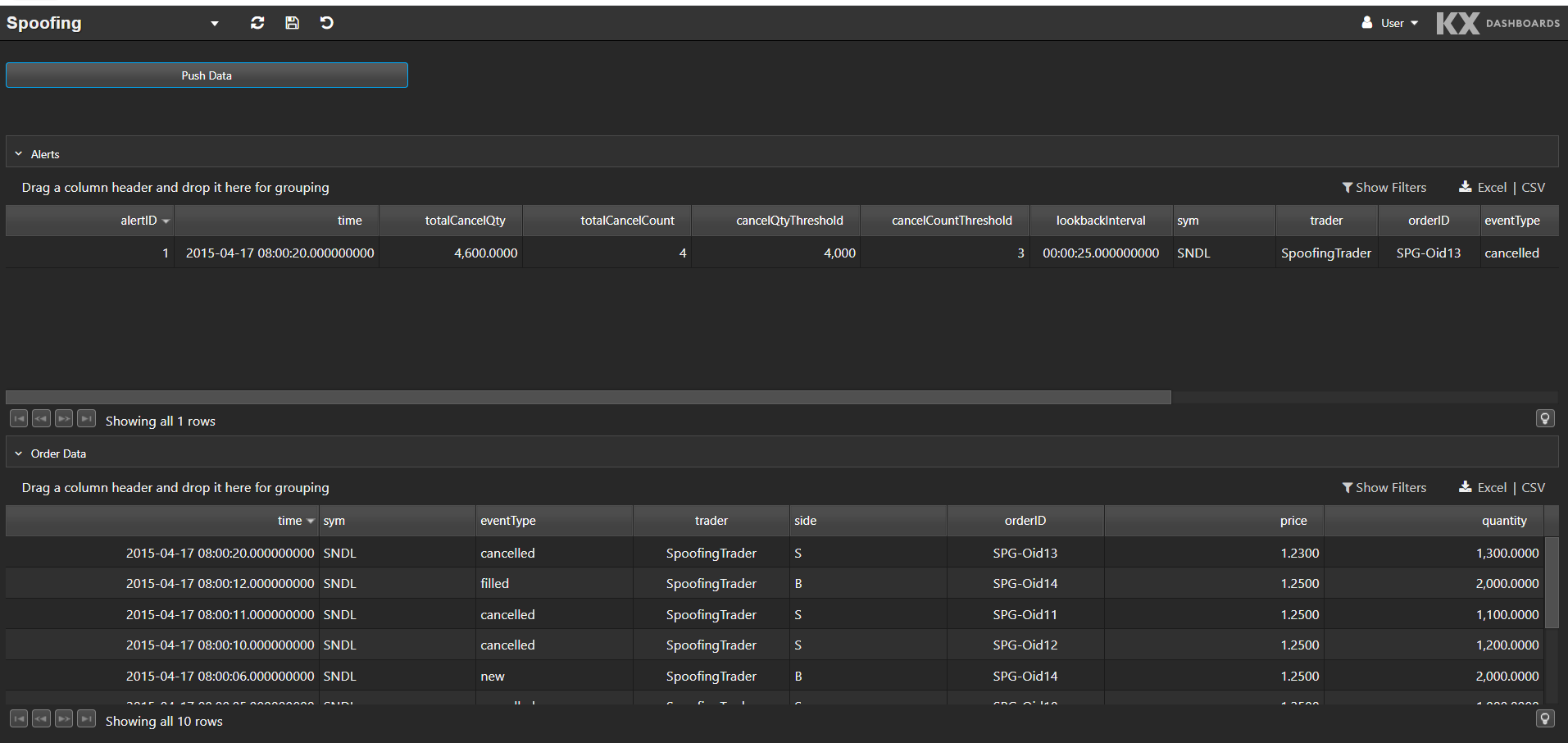
The bottom data grid shows the test order data set. We can push this data into the application by clicking Push Data. Any alerts raised from the data are displayed in the top data grid.
Deploying to different clusters¶
With everything configured, the application can now be deployed into a Kubernetes cluster. To interact with a cluster, we use the Kubernetes command-line interface, kubectl, which allows us to create new objects in the cluster with the command kubectl create. The below shell script, deployK8sCluster.sh, creates the objects for the application and deploys them into a cluster.
#!/bin/bash
echo "Login required to registry.dl.kx.com."
read -p "Enter Username: " user
read -s -p "Enter Password: " pass
echo ""
# Creates namespace and persistent volumes
kubectl create -f kube/surv-cloud-namespace.yml
# Creates a secret to allow running of dashboards images
kubectl create secret docker-registry kxregistry-secret --docker-server=registry.dl.kx.com --docker-username=$user --docker-password=$pass -n surv-cloud
# Creates deployments and services
kubectl create -f kube/surv-cloud.ymlLocal deployment¶
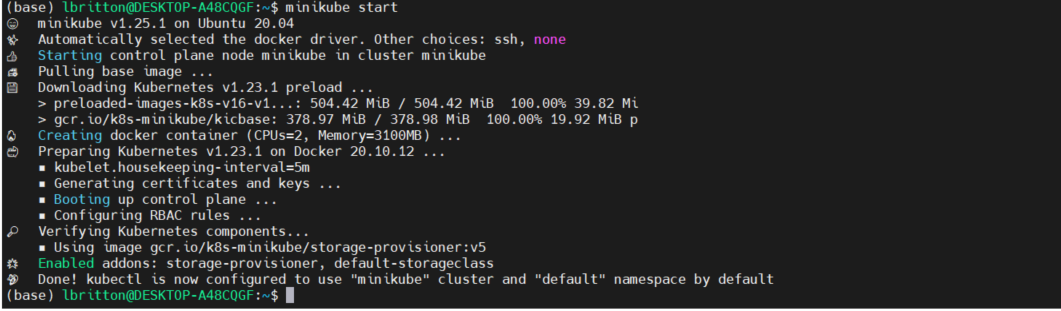
We can set up a Kubernetes cluster on a local machine using Minikube. Once installed, we simply run minikube start to kick off a single node cluster.
Now that there’s a Kubernetes cluster running on the machine, the surveillance application can be deployed to it. We do this by cloning the application repository and running the deployK8sCluster.sh script. See below:
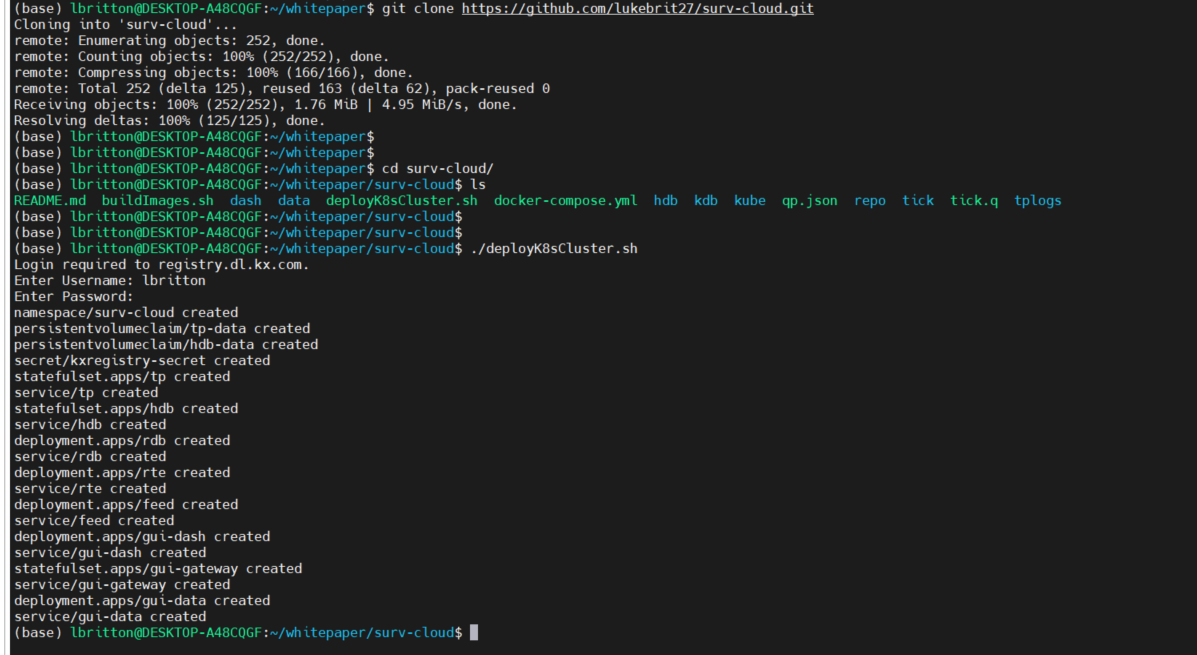
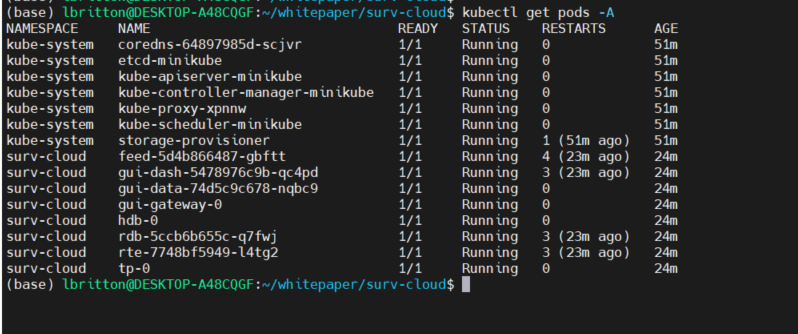
And that’s it! We've deployed the application to a Kubernetes cluster on a local machine. We can see the status of the pods running with the command kubectl get pods -A :
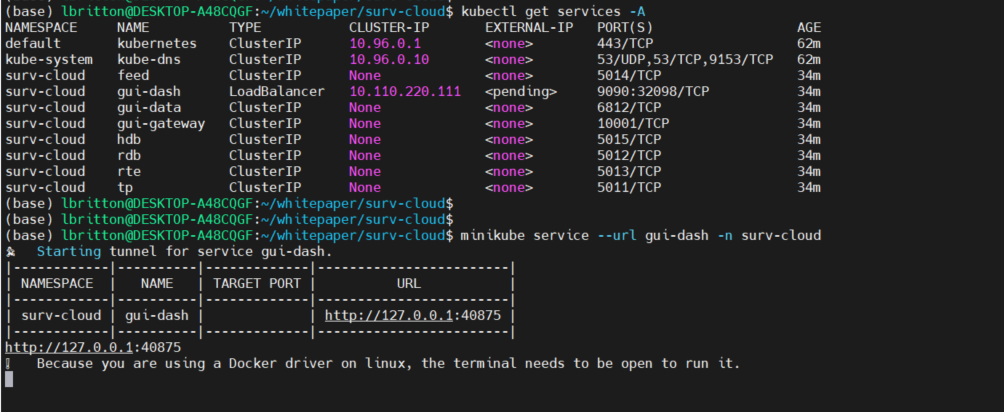
To access the UI of the application, we need to connect to the service associated with the gui-dash deployment. Minikube provides the command minikube service to do this, it returns a URL that can be used to connect to a service. See the command in action below:
We copy the URL returned by minikube service and paste it into a local browser to access the Spoofing dashboard.
AWS¶
AWS provides a service for deploying Kubernetes applications called Amazon EKS (Elastic Kubernetes Service). When using EKS, we can take advantage of lots of services offered within AWS such as Elastic Compute Cloud (EC2), Elastic Block Storage and Elastic Load Balancer (ELB).
We can create Kubernetes clusters from the AWS management console by going to the EKS dashboard and clicking on Add cluster.
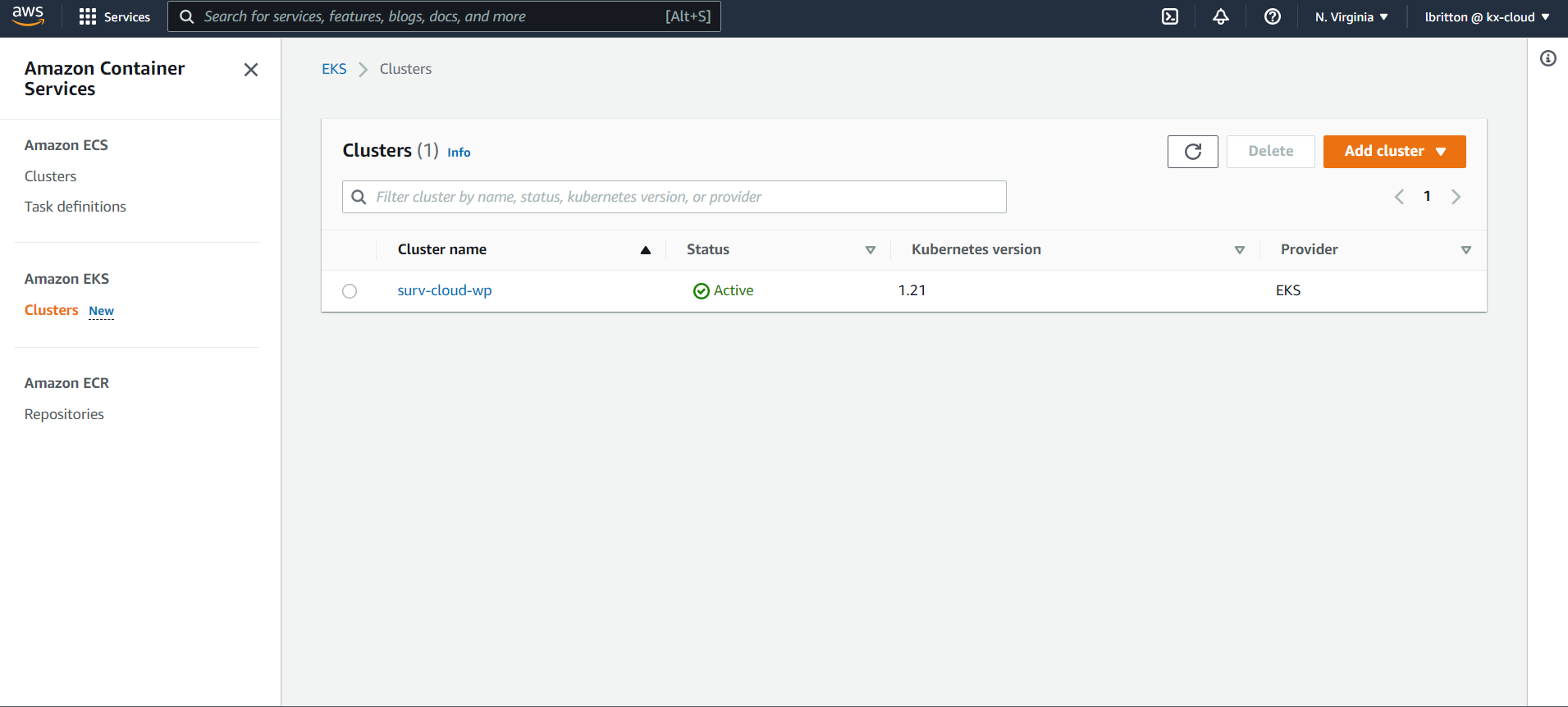
As can be seen in the image above, we already have a cluster created called surv-cloud-wp.
How to add a cluster on the management console
Utilizing the AWS CLI, we can connect to this EKS cluster from a local machine. First we run aws configure to configure the connection to the AWS environment. Once configured, we can use the aws eks command to connect to the surv-cloud-wp cluster:
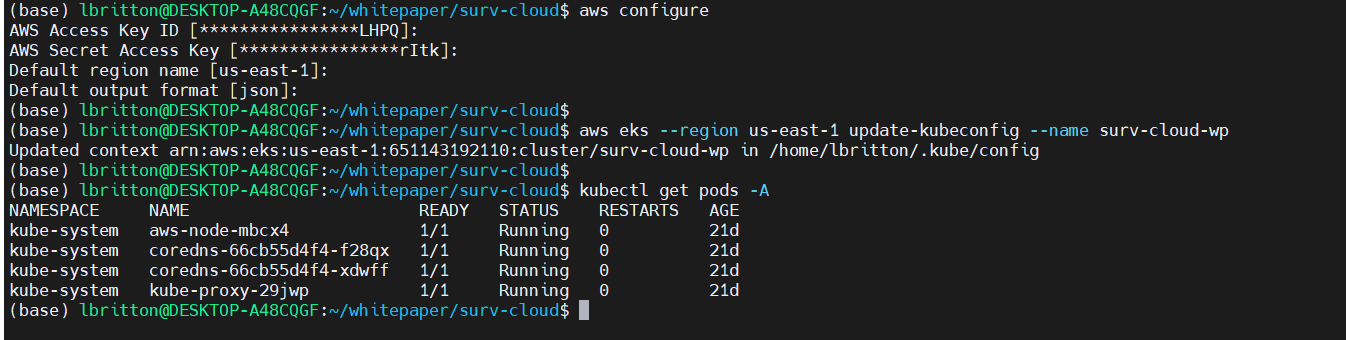
Connected to the cluster, all we have to do now is run the deployK8sCluster.sh script:
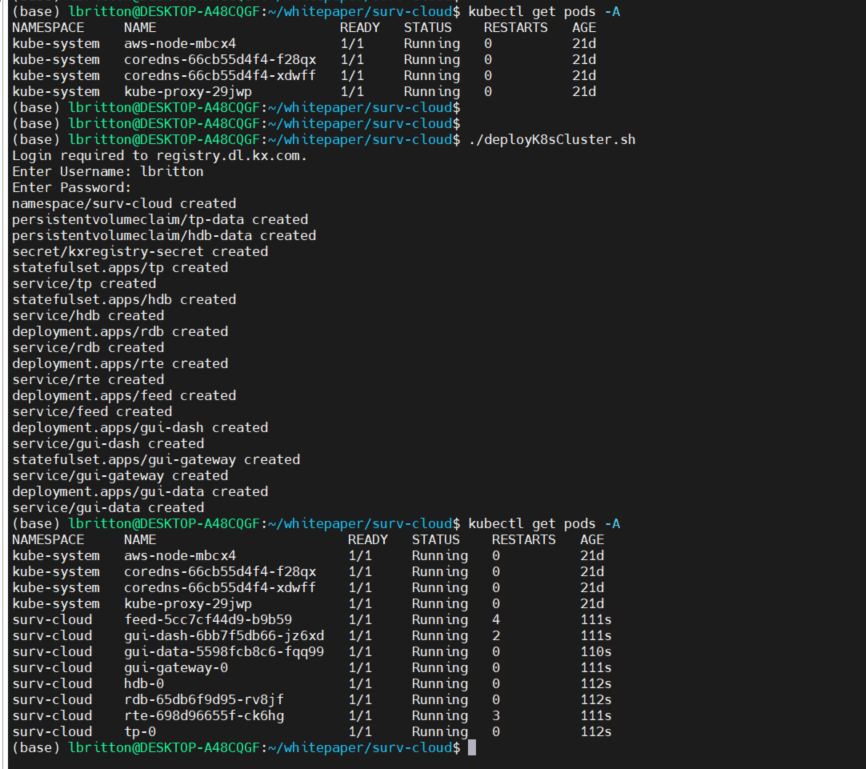
Like with the local deployment, we connect to the UI via the gui-dash service. However unlike the local deploy, AWS will automatically provision an Elastic Load Balancer resource for services that are of type LoadBalancer. This means the gui-dash service will be assigned an external IP or URL that can be used to access the UI. See the external IP assigned to gui-dash below:

The port assigned to the gui-dash service was 9090, as shown in the configuration earlier. We use the external IP + this port to access the UI, as shown here:
That’s it: we’re now running a scalable, fault-tolerant and portable Kubernetes application in the Cloud. One of the great things about this is that we’re taking advantage of lots of AWS resources, the pods are running within EC2 instances, the volumes are created using Elastic Block Storage and HTTP requests are being managed via Elastic Load Balancer. But at the same time, we’re still able to quickly deploy the application on another cloud provider, as shown next with GCP.
GCP¶
Similar to AWS, GCP also provides a service for deploying, managing, and scaling Kubernetes applications, called Google Kubernetes Engine (GKE). This is no surprise, since Google are the original creators of the Kubernetes software.
To create a new Kubernetes cluster in GCP, we go to GKE on the GCP management console and click 'Create'.
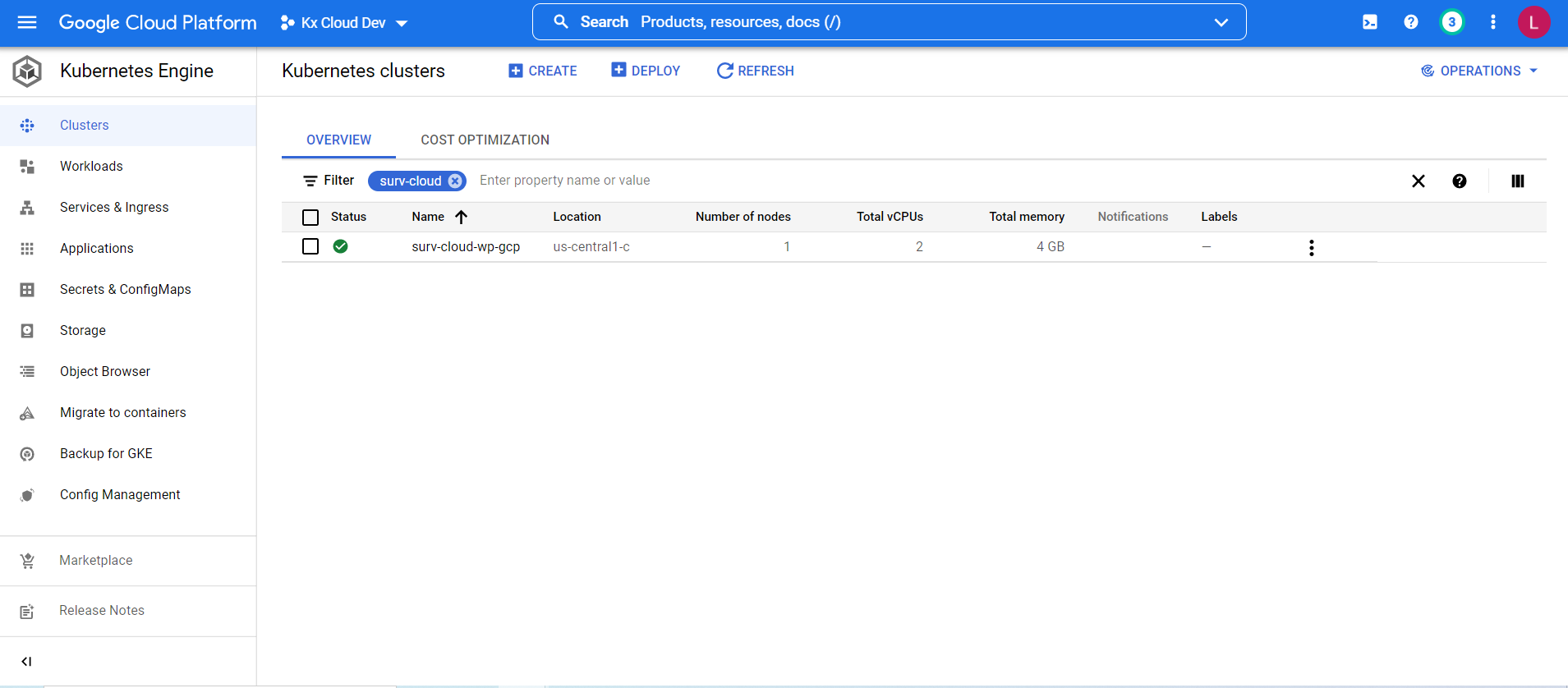
In the above picture we already have a cluster created called surv-cloud-wp-gcp that we will use to deploy the surveillance application. (See the GCP documentation for detailed information on creating clusters on the management console.)
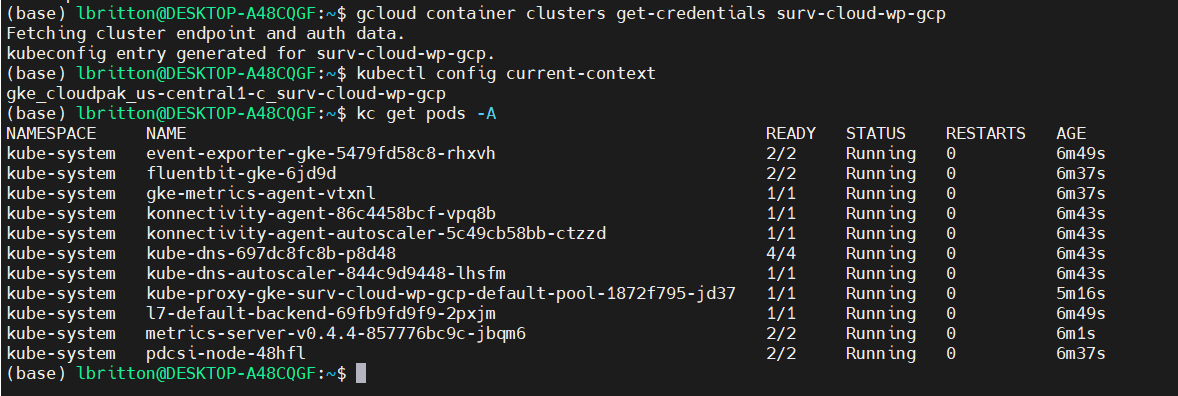
The GCP CLI, gcloud, allows us to connect to the cluster we created from a local machine. We connect by running the command gcloud container clusters get-credentials, which retrieves the cluster data and updates the Kubernetes context to point at it. See the command running here:
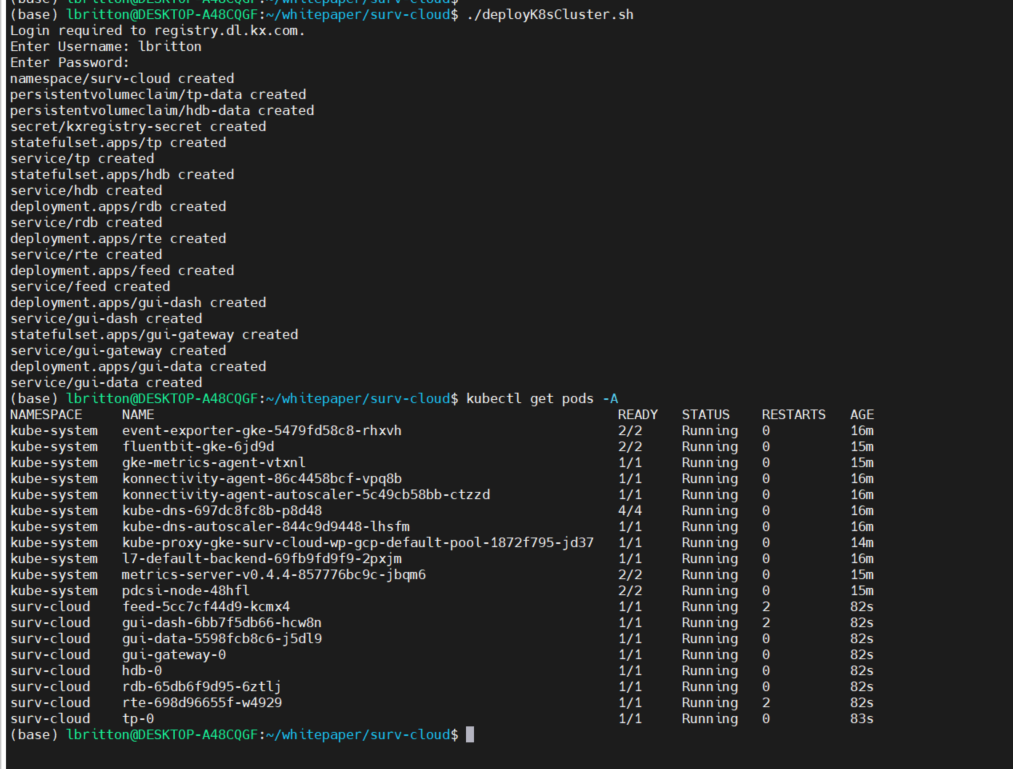
Connected to the cluster, we can deploy the application, once again running the deployK8sCluster.sh script:
Like AWS, when a service in Kubernetes is of type LoadBalancer, GCP will automatically spawn a network load balancer that will be attached to the service. This results in the gui-dash service being assigned an external IP that can be used to access the UI.
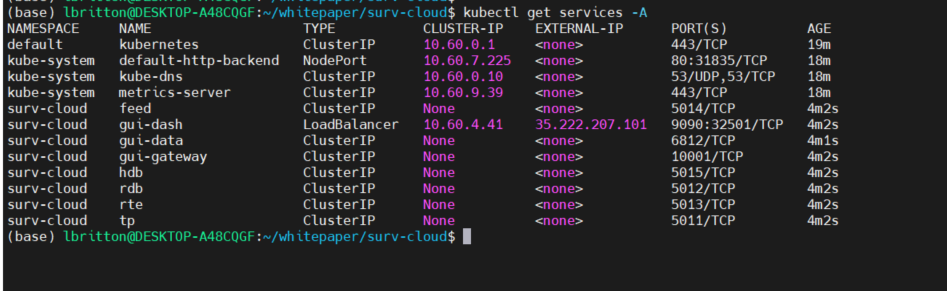
We take the gui-dash external IP and service port to build the URL to access the UI, as seen below:
And once more the surveillance application is deployed to the cloud, this time in GCP. What’s noticeable about the steps that were involved to deploy the application in GCP, is that they were very similar to the steps for deploying to AWS, and equally straightforward. No changes were even required to the Kubernetes configuration files to deploy to GCP versus deploying to AWS. This illustrates the power of using Kubernetes.
Conclusion¶
As alluded to at the start of the paper, trade surveillance systems are only going to become more complex and data intensive. A prime example is the explosion of cryptocurrency over the last few years, now with an average daily trading volume of over $91 billion, creating a web of new regulatory complexities. As a result, fast, robust, and scalable surveillance solutions are now a must. Building surveillance applications in kdb+ provides unrivalled computational speed on large datasets, and as shown, deploying them using Kubernetes offers the scalability and built-in fault-tolerance we crave without having to become surgically attached to a single cloud provider. This is the approach adopted by KX Insights, where processes like the tickerplant, RDB and HDB are implemented as microservices that can be flexibly orchestrated into robust, scalable solutions.
You can comment on this article on the KX Community.
Author¶

Luke Britton has helped develop surveillance systems to identify market abuses for major international investment banks and exchanges, helped build and maintain a data warehouse for a new Mexican stock exchange for exchange monitoring, worked as part of an internal R&D team to build a product solution for the new U.S. regulatory requirement CAT, and led telemetry data visualization workshops for the MIT Motorsport team for their Formula SAE car.